Welcome to Robotics Laboratory
(Videos of some skillful robots)

Welcome to the Robotics Laboratory at ISU! We are an energetic group that investigates fundamental problems in robotics with efforts balanced between theoretical inquiries and experimental demonstrations.
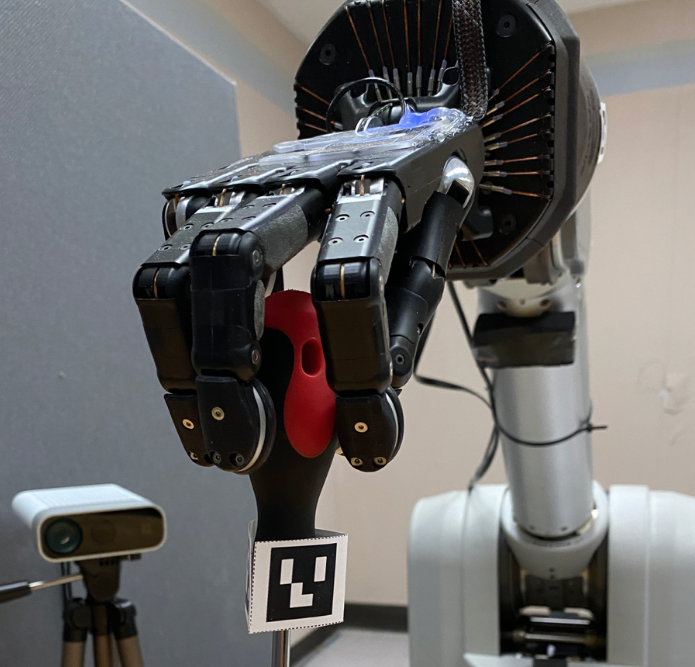
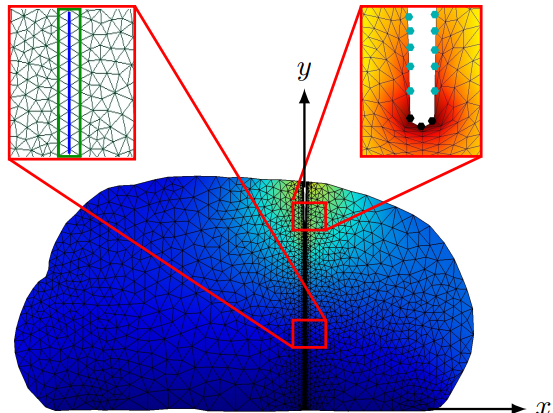
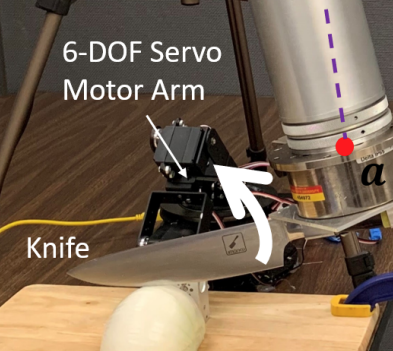
Our current research have two thrusts. The first one is to develop a robotic system specialized on slicing, dicing, or chopping deformable objects such as fruits, vegetables, and meats. We are investigating modeling of object deformation and contact force under cutting, and designing strategies for basic maneuvers such as object pickup and stabilization, and kitchen knife pickup and movement control. The goal is to understand in depth about manipulation of delicate, flexible, and slippery items, handling of tools with skills, coordination among robotic arms and hands, and motion planning and control based on multi-modality sensing and deformable modeling.
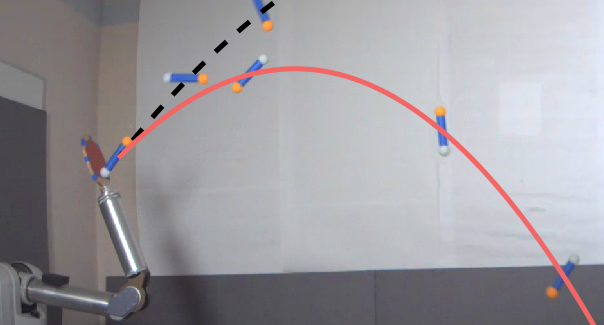
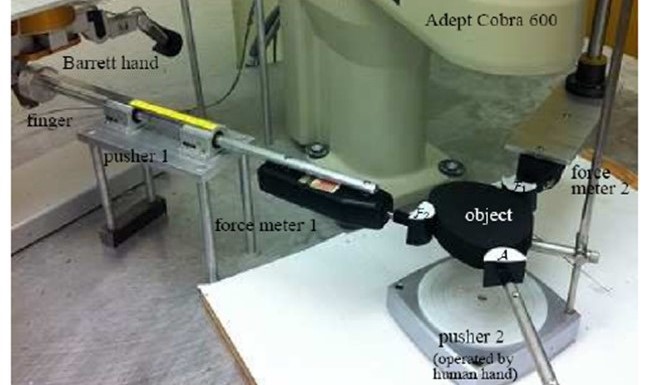
The second thrust is focused on the physical phenomenon of impact and its use in robotic manipulation. Impulsive forces can be used to accomplish tasks that would otherwise be quite difficult. Examples include hammering a nail, cracking an egg, opening a stuck window, hitting a tennis ball, etc. We are studying or have studied the following subproblems: a) efficient computational modeling of the simultaneous collision of multiple rigid bodies; b) development of an open source interactive graphical simulator for collision, for both research and education purposes; c) planning impact in a task to yield some desired post-impact motion of an object; and d) synthesis of a manipulation plan to combine impulsive actions with dynamic motions to demonstrate skills not yet achieved by robots.
Other research topics and interests include:
- Manipulation of hand tools
- Robotic Cutting
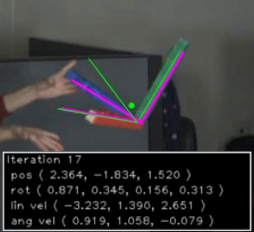
- Vision-based motion estimation
- Grasping of deformable objects
- Deformable modeling
- Path planning
- Tactile shape recognition and reconstruction
- Localization and robot sensing
- Geometric algorithms for curves and surfaces
- Nonlinear control and observation
- Kinematics and dynamics of manipulation
If any of the above topics interests you, welcome to join us and do some exciting robotics research.
We acknowledge the generous support by the National Science Foundation through the following grants:
- IIS-1651792
(2016-2018)
- IIS-1421034
(2014-2018)
- IIS-0915876
(2009-2013)
- IIS-0742334
(2007-2009)
- CAREER Award IIS-0133681 (2002-2008)

Any opinions, findings, and conclusions or recommendations
expressed in this material are those of the author(s) and do
not necessarily reflect the views of the National Science
Foundation.
Translations:
Croatian |
Georgian |
Kazakh |
Norwegian |
Polish |
Portuguese |
Spanish |
Thai |
Turkish |
Ukranian |
Vietnamese |
Urdu |
Estonian |
Urdu |
Sindhi