robotic screwdriving
modeling of deformable cutting
dexterous food cutting
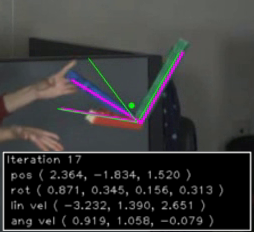
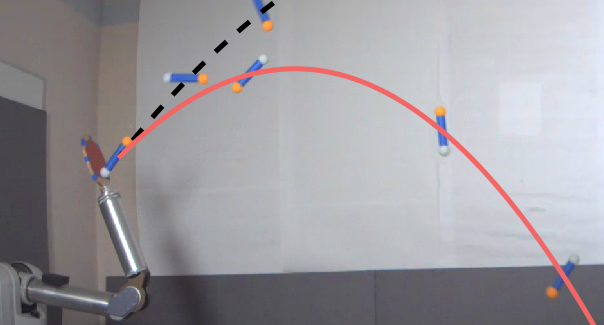
state estimation of a flying object
multicollide impact simulator
batting to a target
two body impact in 3D
Newton’s cradle
3D impact with compliance
multiple impacts
impact summary
picking up soft solids
grasping deformable objects
2D deformable grasping summary
deformable modeling
computing antipodal points
surface patch reconstruction
recognition by curve registration
differential invariants
contour tracking
contact sensing & localization
dynamic observation
geometric sensing