Deformable Modeling of Parametric Shells Grasped by a Robot
Translations: Spanish | Ukrainian |
Deformable objects are ubiquitous in our daily life. The ability to manipulate them is an important measure of the robot’s intelligence and dexterity. Such skill expects to not only exert impact on medical robotics but also open the door for the development of home robots. Despite the rich literature on robot grasping and dexterous manipulation, grasping of deformable objects has remained an underdeveloped research area. This is in part due to the lack of a geometric framework to characterize this type of grasps, and in part due to the high computational cost of modeling the grasping process itself.
Stepping into this largely unexplored area, we have conducted investigation on the modeling of the deformation of grasped objects. In particular, we have focused on computation of the deformations of thin shells under applied loads. A shell is a body enclosed between two closely spaced and curved surfaces. Classical theory of shells assumes a parametrization along the lines of principal curvature on the middle surface of a shell. Such a parametrization, while always existing locally, is not known for many surfaces, and deriving one can be very difficult if not impossible.
We have extended both linear and nonlinear shell theories to describe extensional, shearing, and bending strains in terms of geometric invariants including the principal curvatures and vectors, and the related directional and covariant derivatives. To our knowledge, this is the first non-parametric formulation of thin shell strains. A computational procedure for them and the strain energy is then offered for general parametric shells. In the modeling, shell deformations are conveniently represented using subdivision surfaces.
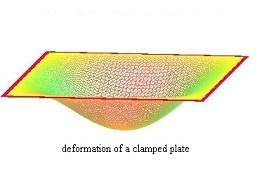
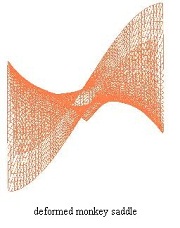
The leftmost figure shows our solution to a benchmark problem involving a square plate with a clamped boundary under uniform load of gravity. The right figure displays a deformed mathematical surface, in this case a monkey saddle, under point load. It is worthy of note that classical shell theory is not directly applicable to such a shape which does not have a known parametrization along its lines of curvature.
We have compared the results via potential energy minimization over a couple of benchmark problems with their analytical solutions and the results generated by two commercial softwares ABAQUS and ANSYS. The figure to the right plots relative errors of maximum displacement against the number of mesh nodes on modeling a pinched cylinder. The slope of our method is approximately -2, which implies quadratic error decay. ABAQUS and ANSY only achieved linear error decay. In other words, our method has a convergence rate an order of magnitude higher.
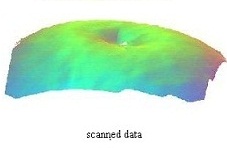
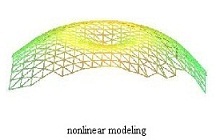
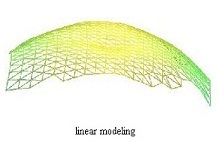
We have conducted experimental validation involving regular and freeform shell-like objects (of various materials) grasped by a robot hand, with the results compared against scanned 3-D data (accuracy 0.127mm). Below compares the scanned image (left), and the modeling results by nonlinear (center) and linear (right) methods, all of a contact region of a tennis ball grasped by a BarrettHand at the antipodal configuration. Nonlinear modeling generates more accurate result than linear modeling (average errors 0.81mm vs 2.0mm).
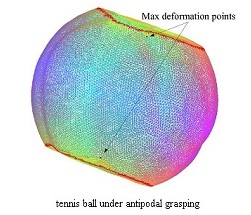
Thus, for modeling large deformations, the linear elasticity theory is inaccurate, and the nonlinear theory needs to be chosen. The next figure displays the deformed tennis ball with its top and bottom contact regions computed based on the nonlinear elasticity theory, and the middle (undeformed) region from scanned 3-D data. The red lines mark the region boundaries.
Grasped objects often undergo sizable shape changes, for which a much higher modeling acccuracy can be achieved using the nonlinear elasticity theory than its linear counterpart.
For more information, we refer to the following publications:
- Jiang Tian and Yan-Bin Jia. Modeling deformations of general parametric shells grasped by a robot hand. IEEE Transactions on Robotics, vol. 26, no. 5, pp. 837-852, 2010. (Finalist for the 2010 IEEE Transactions on Robotics King-Sun Fu Memorial Best Paper Award).
- Jiang Tian and Yan-Bin Jia. Modeling deformable shell-like objects grasped by a robot hand. In Proceedings of the IEEE International Conference on Robotics and Automation, pp. 1297-1302, Kobe, Japan, May 12-17, 2009.
- Yan-Bin Jia and Jiang Tian. Deformations of general parametric shells: computation and robot experiment. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robotics and Systems, pp. 1796-1803, Nice, France, Sep 22-26, 2008.
 This material is based upon work supported by the National Science Foundation under Grant IIS-0742334 and IIS-0915876.
This material is based upon work supported by the National Science Foundation under Grant IIS-0742334 and IIS-0915876.
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Last updated on Apr 3, 2010.