Two-Finger Grasping of Deformable Objects
Translation: Hungarian
Grasping deformable objects is inherently different from grasping rigid ones for which two types of analysis have been developed. Form closure on a rigid object eliminates all of its degrees of freedom, while force closure keeps the object in equilibrium with the ability to resist any arbitrary external wrench. A deformable object, however, has infinite degrees of freedom, which makes form closure impossible. On the other hand, the grasp wrench space changes as the object deforms, which makes it impossible to conduct any conventional force closure analysis.
Robot grasping of deformable objects is an under-researched area primarily due to the stringent requirement of equilibrium before and after deformation, and the high cost of physics-based deformable modeling. Deformation induced by a grasp can be modeled using the elasticity theory, with the grasping fingers imposing needed positional constraints.
A “natural” approach seems to be seeking forces that can maintain pre- and post-deformation equilibriums. However, extra geometric constraints would have to be imposed at the finger contacts in order to obtain the deformed shape. Enforcement of such constraints would require extra forces or torques that could not be generated in a real situation. Our approach is to specify desired displacements of the fingers rather than the forces they exert, for several reasons:
- Displacement constraints are usually sufficient for determining the deformation.
- Forces obtained using the FEM automatically balance each other and also torque equilibrium is maintained.
- In pratice it is much easier to command a finger to move to a designated position than to control it to exeer a prescribed force.
- Force magnitudes are not much of our concern as long as an object can be grasped.
1. Squeeze Grasping
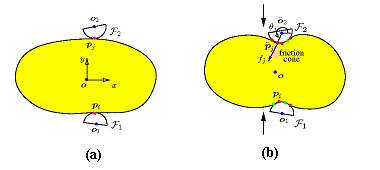
We have designed a strategy that grasps an object by squeezing it via finger translations in two ways: (1) stable squeezes, which maximize the object’s strain energy among all squeezes of the “same amounts”, and (2) pure squeezes, which prevent any rigid body motion. The grasp strategy assumes linear easticity and employs the finite element method (FEM). The initial configuation is shown in the right figure(a). Under the squeeze, each contact point will grow into a region as shown in the right figure(b) in which the points may switch their contact modes between stick and slip. We propose an event-driven grasping algorithm that tracks deformation and contact configuration during a squeeze under contact friction.
a) Squeeze Algorithm via Incrementally Updating Contact Configuration
We consider two grasping fingers that have identical semicircular tips with radius. As the squeeze begins, some boundary nodal points may come into contact with the fingertips, while others may break contact with them. A node in contact may be sticking to a fingertip or it may be sliding on it. There are four types of events: a node comes into contact with a finger(event A); contact breaks at a node (event B); contact at a node switches from stick to slip (event C); and contact at a node switches from slip to stick (event D). We track the movements of all contact nodes until an event occurs to trigger a change in the contact sets and then start a new round of deformation update.
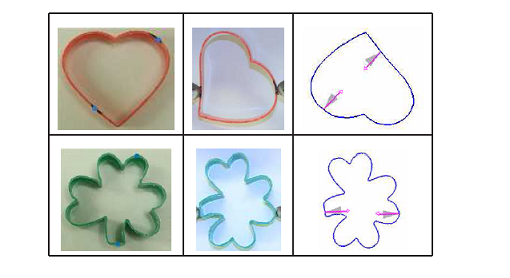
In the experiment, a Barrett Hand grasped two types of objects: ring-like ones and solid ones.
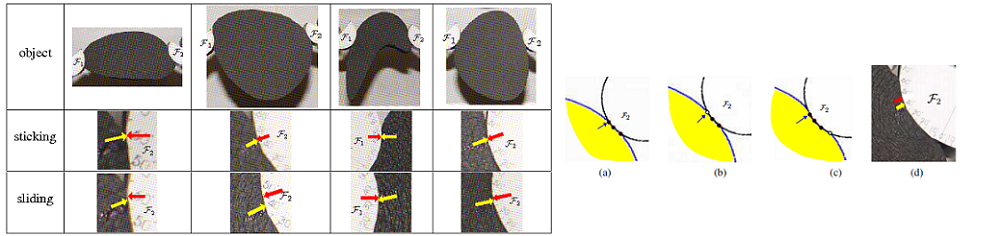
The first row of figures below on the left displays two ring-like objects trimmed from cookie cutters. The two grasping fingers make small contact regions with the object that can be approximated as point contacts. The second row shows two successful grasps by two fingers of a Barrett Hand that agree with the squeeze algorithm’s predictions in the third row.
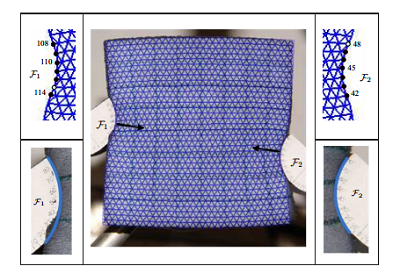
In the figures below on the right a square made of rubber foam was grasped by the Barrett Hand mounted with spherical fingertips. In the central column, the deformed mesh from simulation is superposed onto the deformed rubber square(black) with almost perfect alignment. The first and third column give close-up comparisons between the contacts on each finger, from experiment and by simulation.
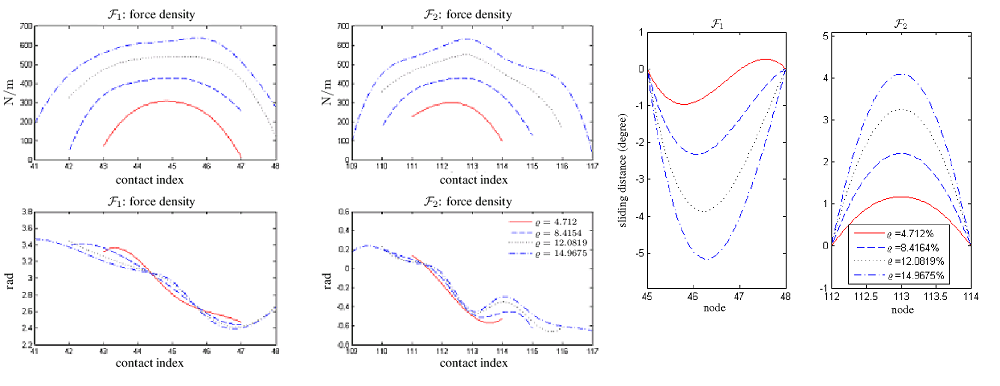
The left figure below displays evolution of the contact forces during the squeeze on the square. The contact force magnitudes at individual nodal points calculated in simulation were transformed into force density (which is parametrized by a cubic spline) over the entire contact segment. The density curves at four different values are plotted separately for the two fingers. We see that on each curve the density tapers off near the endpoints. The total force on a finger contact segment, as the area below a curve, increases with squeeze depth.The right figure below shows the profiles of the sliding contacts on the two fingers as squeeze depth increases. The curves plotting contact movements are cubic splines interpolated over the nodal displacements obtained from simulation. As squeeze depth increases, the sliding distances of the contacts increases.
b) Contact Mode Transitions
Among the four types of events introduced, Event A of contact establishment is destined to occur. Event B of contact breaking is so rare that it was not observed in the experiment. Event C of stick-to-slip transition was widely observed in both simulation and experiment wherever friction was insufficient. The left table below shows some grasps during which events of this type happened. Each of columns 2-5 displays one object, using yellow and red arrows to respectively indicate movements of two points, one on the object and the other on the fingertip. These two points were shown initially in sticking contact (in row 2) and later separated from each other due to sliding (in row 3), as the squeezes continued. Event D happened a lot less often than Event C according to our observations. This is in part because most contacts are established as sticking ones. In such a case, Event D may happen only after Event C does. The right figure below shows an example of transitions of a contact from stick to slip to stick.
2. Adversary Finger Resistance
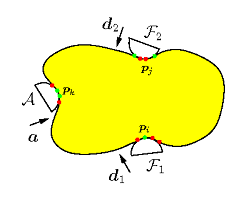 Suppose an adversary finger A makes contact with the object at pk, and tries to break the grasp via a translation by a. To resist A, the two grasping fingers F1 and F2, making initial contacts at pi and pj, translate by d1 and d2, respectively. We would like to find d1 and d2 that result in the minimum total effort by F1 and F2 in such resistance. The effort of resistance is best characterized as the total work performed by these two fingers. The general scenario is depicted in the left figure, in which the finger contacts have evolved from the nodes pi, pj, pk into segments as F1, F2, A translate.
Suppose an adversary finger A makes contact with the object at pk, and tries to break the grasp via a translation by a. To resist A, the two grasping fingers F1 and F2, making initial contacts at pi and pj, translate by d1 and d2, respectively. We would like to find d1 and d2 that result in the minimum total effort by F1 and F2 in such resistance. The effort of resistance is best characterized as the total work performed by these two fingers. The general scenario is depicted in the left figure, in which the finger contacts have evolved from the nodes pi, pj, pk into segments as F1, F2, A translate.
This optimization problem will be approached in three steps. First we look at fixed point contacts during the resistance. Next, we generalize the result to fixed segment contacts. Finally, we tackle the general situation with varying the contact sets and changes of modes at individual nodal contacts under Coulomb friction and propose a stepwise algorithm to resist as the adversary finger translates by minimizing the work done by the grasping fingers.
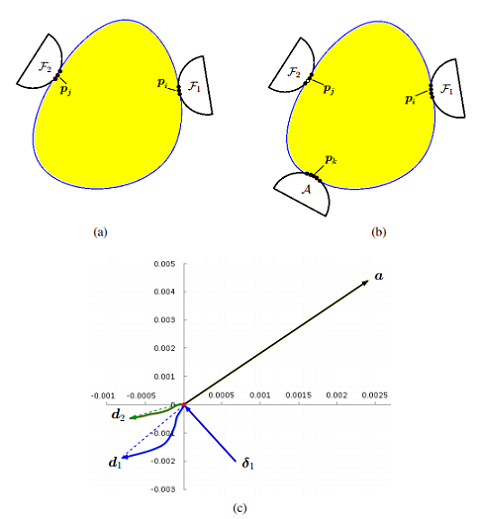
The left figure below displays the an object in initial contact with two rounded fingers F1 and F2 at the nodes pi and pj. F2 stayed still and F1 squeezed the object via a translation (0.00068, 0.002) along the line through their initial contact points with the object(see (a)) In (b), the adversary finger A then translates by a = (0.0024, 0.0044). The trajectory of A is shown as the black directed line in (c). Simultaneously, F1 and F2 translate along two trajectories generated by our algorithm which are shown as the directed polylines in (c). They have performed additional work of 0.0086 to resist A. Contact events A, B, C, D have occurred 7, 0, 3, and 2 times, respectively, during the resistance phase.
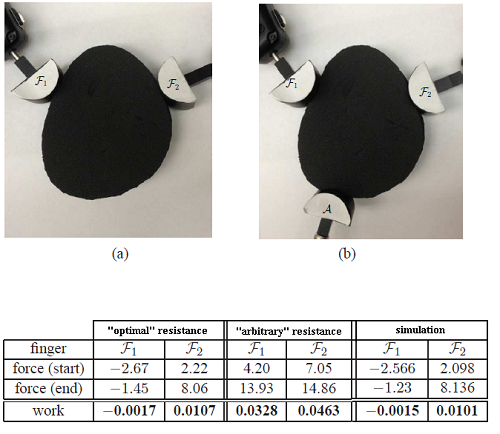
Shown in the right figure below is an experiment conducted with semi-circular fingertips of radius 0.02. The fingers F1 and F2 first made contact with a foam object. While F2 stayed still, F1 squeezed the object via a translation (-0.00068, 0.002) along the line through their initial contact points with the object. Afterward, the adversary finger A started pushing the object via a translation a = (0.0024, 0.0044). Our algorithm generated two trajectories respectively for F1 and F2 based on stable squeezes. For ease of hand control, each trajectory was straightened by connecting its starting location to its final location, yielding overall translations d1 = (-0.0008,-0.0019) and d2 = (-0.0007, -0.0005). We refer to the resistance specified by d1 and d2 as the “optimal” resistance. During the resistance, F2 retreated slightly (i.e., moved away from the object).
We attached a force meter shown in the third figure to a fingertip such that the meter’s axis was aligned with the fingertip translation. The work done by the fingertip was estimated as half the product of the translation distance with the sum of the initial and final force readings. The squeeze-and-resistance process was repeated three times, each time with the force meter attached to a different fingertip, for measuring its exerted force. Guided by the generated trajectories (plotted on the platform), the three repeats yielded outcomes with slight differences that were within the acceptable range.
For comparison, we also tested an “arbitrary” resistance strategy against the same adversary finger disturbance. The right bottom table displayed the force readings on each finger at the start and the end of each resistance strategy, and the work performed by the finger compared to the simulation. It can be seen that much less work was carried out by F1 and F2 under the “optimal” resistance strategy.
For more information, we refer to the following papers:
Yan-Bin Jia, Feng Guo, and Huan Lin. Grasping deformable planar objects: squeeze, stick/slip analysis, and energy-based optimalities. (671K, 52 pages). International Journal of Robotics Research, vol. 33, no. 6, pp. 866-897, 2014.
Yan-Bin Jia, Huan Lin, and Feng Guo. Optimal two-Finger squeezing of deformable Objects. (225 K). In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 3514-3519, Tokyo Big Sight, Japan, November 3-8, 2013.
Feng Guo, Huan Lin, and Yan-Bin Jia. Squeeze grasping of deformable planar objects with segment contact and stick/slip transitions [ Abstract ](448K). In Proceedings of the IEEE International Conference on Robotics and Automation, pp. 3721-3726, Karlsruhe, Germany, May 5-9, 2013.
Yan-Bin Jia, Feng Guo, and Jiang Tian. On two-finger grasping of deformable planar objects. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, pp. 5261-5266, Shanghai, China, May 9-13.
 This material is based upon work supported by the National Science Foundation under Grant IIS-0915876.
This material is based upon work supported by the National Science Foundation under Grant IIS-0915876.
Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Last updated on April 23, 2013.